HJMAG803C電流型三軸高精度弱磁測量模塊
- 分類:新品發布
- 作者:
- 來源:
- 發布時間:2022-04-11
- 訪問量:
??磁測量模塊在姿態控制、俯仰角測量和伽馬測量等系統實際應用時,由于采集器往往距離模塊較遠、且有可能進行信號轉接,導致模擬電壓信號傳到末端時信噪比(SNR)損失較大,從而影響整體的測量精度。
01背景
磁測量模塊在姿態控制、俯仰角測量和伽馬測量等系統實際應用時,由于采集器往往距離模塊較遠、且有可能進行信號轉接,導致模擬電壓信號傳到末端時信噪比(SNR)損失較大,從而影響整體的測量精度。另外隨著國際環境的不確定性和中美摩擦不斷升級,美國等針對中國集成電路行業的打壓呈逐步擴大化趨勢,采購進口集成電路越發困難,價格成百倍千倍飛漲,嚴重影響中國經濟發展及國家安全,集成電路產業走國產自主化道路必然是大勢所趨。鑒于此狀況,航晶微電在經過前期市場調研、方案論證、實驗驗證和自身豐富的磁測量技術積累與研究,成功研制出了自主國產的三軸磁測量模塊,可功能替代進口的HMR2300
02概述
HJMAG803C是一款電流輸出型三軸高精度弱磁測量模塊。該模塊采用了調制解調技術和PID調節技術,使得磁傳感器探頭一直工作在零高斯附近。以此來消除外界強磁場干擾(比如永磁鐵、強電磁脈沖等),同時減小零位時漂(dK0/dT)和二次非線性(K2)。為了用戶進行溫度建模修正、內部嵌入了一個AD590來測量傳感器當地溫度。
考慮到實際應用時,采集器往往距離模塊較遠、且有可能轉接,模擬電壓信號傳到末端時信噪比(SNR)損失較大,從而影響測量精度。故借鑒工業遠距離傳輸模擬信號的4~20mA電流環傳送方式傳電流,達到高保真模擬信號遠距離傳輸目的。只不過這里考慮到最大20mA時,模塊的熱功耗問題,改為了1~9mA。零高斯時,輸出為5mA。
該款磁測量模塊在結構設計、選材、加工中沿用公司在磁測量領域豐富的工程加工和實踐經驗,有效的確保模塊的性能和應用方面滿足客戶的需求。依據標準為SJ20668-1998《微電路模塊總規范》相比于傳統電壓型磁傳感器具有驅動長線、增強信噪比、系統工作態可檢查、抗干擾、精度高、可靠性高、穩定性好等特點,可功能替代美國生產的HMR2300三軸磁測量模塊。該模塊可服務于航空、航天、兵器和石油等諸多領域,應用在姿態控制、俯仰角測量、轉速測量和伽馬測量等系統中。

注1:HMR2300軟件控制采用非隔離的RS-232/RS-485接口芯片,容易受遠端地線的共/差模干擾產生誤碼,嚴重時會損壞其中的收發器。客戶使用時,需要對內部軟件進行認證和兼容設計。而HJMAG803C內部無需編程,輸出1~9mA電流信號,相較于內部編程的HMR2300使用更加方便,具有輸出帶長線、高信噪比、高精度等特點。
注2:因接插件材料磁性影響,為保證磁傳感器測量精度,HMR2300敏感軸區域處于外殼右側。HJMAG803C的接插件材料采用無磁材料,磁敏感軸區域處于外殼幾何中心位置。
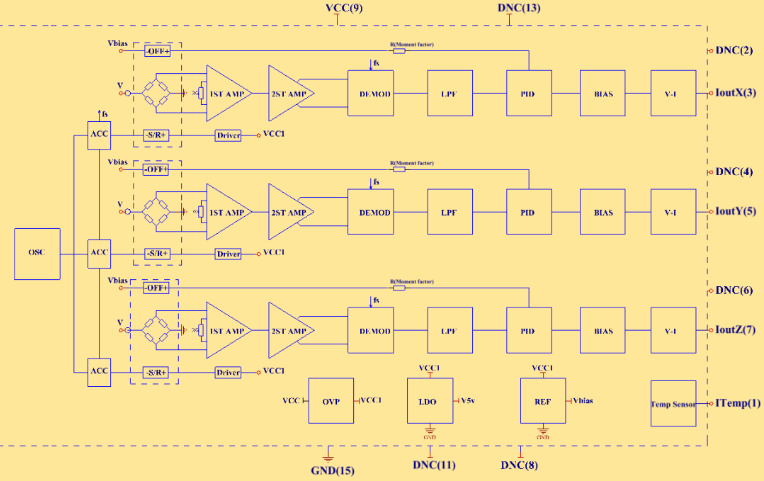
03電原理框圖
04封裝形式與引出端功能
1.封裝形式:采用無磁金屬封裝,外形尺寸如圖所示。(單位:mm)
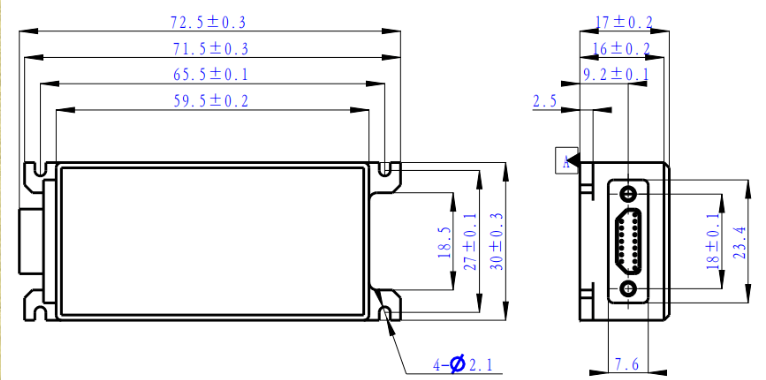
注:外殼尺寸:L*W*H=72.5*30*17mm, 安裝基準面已經過拋光處理。
2.引出端功能
除非另有說明,VCC=15±5%V,TA=25℃。
09應用注意事項
1.該模塊采用無磁鋁殼體、通過激光焊完成封蓋。引出腳采用J30J-15TJP無磁航空插座,激光焊接在殼體上。故該模塊的封裝不是一個氣密封裝。使用時不允許用清洗液清洗,也要預防其他酸、堿、鹽、氣氛滲入。同時,凡引出端標注“DNC”的,為內部調試端。不能引出,更不能與無關電位碰接。否則輕者會破壞工作狀態,重者則會燒毀模塊。
2.模塊三個正交軸的指向見下圖(頂視圖)。
3.四個通孔(Φ2)上的螺絲應選用無磁螺絲固定器件。
4.由于電流能產生磁場,故布局時應盡量避免單向大電流線靠近,以免產生噪聲/零漂。若距離拉不開,則建議供電線和回線(即GND)同時等間距布排,能雙絞最好。這樣的布排有利于電流產生的磁場相互抵消。
5.該模塊雖然能可靠工作在TA≥175℃的環境中,但由于AD590的測量范圍所限,高于125℃時不能使用該模塊內部的溫度傳感器來作為溫度標定。
6.由于模塊裝配在裝備中的磁環境各不相同。周邊的硬磁干擾和軟磁干擾也不盡相同,最終會導致三軸輸出的零位(K0)和比例因子(K1)有變化。因此建議用戶要在上位機中建模修正。
7.將模塊放置在磁屏蔽桶中,或者用坡莫合金材料包裹,加電測量長線末端的電流。若為5mA,則表明連接正常。若測不出、第一要考慮連線是否斷路。
8.為提高系統采集信噪比,建議客戶采用就近地做信號參考;
9.客戶在采用長線應用時,建議在模塊電源端設計浪涌保護電路。
10.若用于飛機地磁導航,則必須要進行如下工作:
A、地球的地理北極與地磁北極不在一個點上,故要建模修正;
B、必須要針對經度進行建模修正,否則遠航程飛行時誤差會很大;
C、要與三軸加速度計捷聯,從而完成針對飛機的俯仰角及橫滾角建模修正;
D、詳細的原理及實現,請參考Honeywell公司的《Applications of Magnetoresistive Sensors in Navigation Systems》這篇應用文章。
11.模塊背面為安裝基準面,是專門拋光處理的,故不能損傷。
10相關產品
1.HJMAG803三軸高精度弱磁測量模塊
2.HJMAG803A高溫三軸高精度弱磁測量模塊
3.HJMAG804雙軸高精度弱磁測量模塊
4.HJMAG805A高精度地磁參考轉速測量模塊
5.HJMAG805B高精度地磁參考轉速測量模塊
推薦資訊
企業留言





微信公眾號
TOP